Topanga
so much for our line art tattooed camouflage idea…

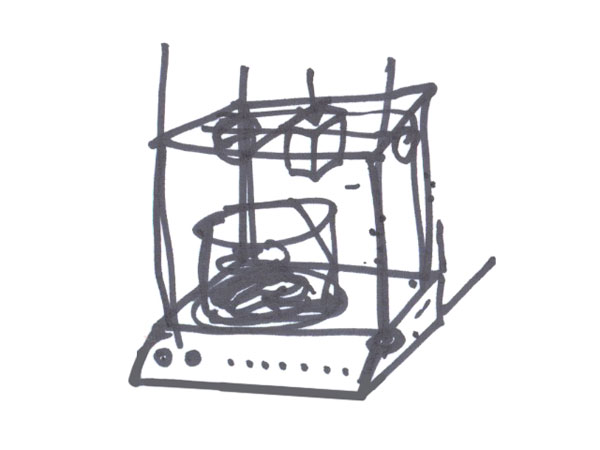
This is a sketch of the urchinBot’s touch-sensing skeleton. No time to explain…

Sensing Skin for UrchinBot
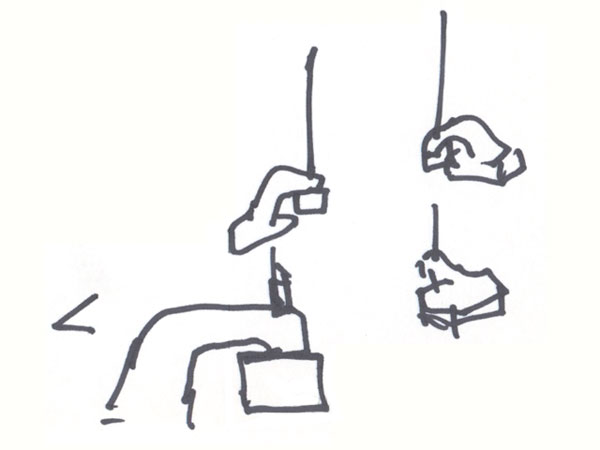
In order to make mathematical forms – or any forms, the two axis must numerically correlate together. So the number of motor steps to make one full table revolution will be related to the number of steps needed to move the table linearly from “min” to “max” (about 7″). We use opto-endstops to sense the limits. The best tab to block the opto endstop (and signal a min,max, or full table rotation) was a foil strip from a teabag packet. Great tea too.

Before I eat breakfast and turn on the television on this very beautiful morning, I have to admit that I feel all the excitement about President Obama’s inauguration. Everyone is in fevered anticipation for his speech. I think before I do anything, I’m gonna call my baby (hopefully we’ll hang out).